 Open Data Science Europe Metadata Catalog
Open Data Science Europe Metadata Catalog
MOOD-H2020
Type of resources
Available actions
Topics
Keywords
Contact for the resource
Provided by
Years
Formats
Representation types
Update frequencies
status
Scale
Resolution
-

The Land Cover Map of Europe 2017 is a product resulting from the Phase 2 of the S2GLC project. The final map has been produced on the CREODIAS platform with algorithms and software developed by CBK PAN. Classification of over 15 000 Sentinel-2 images required high level of automation that was assured by the developed software. The legend of the resulting Land Cover Map of Europe 2017 consists of 13 land cover classes. The pixel size of the map equals 10 m, which corresponds to the highest spatial resolution of Sentinel-2 imagery. Its overall accuracy was estimated to be at the level of 86% using approximately 52 000 validation samples distributed across Europe. Related publication: https://doi.org/10.3390/rs12213523
-
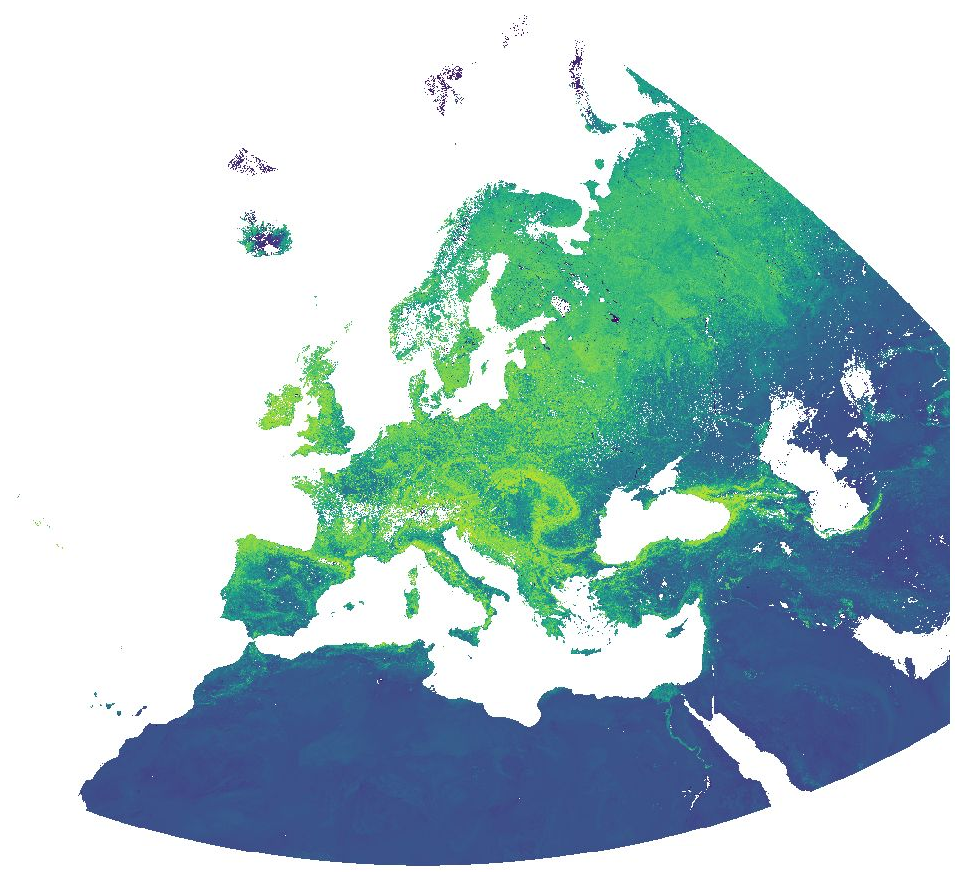
Normalized Difference Vegetation Index (NDVI) and Enhanced Vegetation Index (EVI) from MODIS data for Europe at 1 km resolution. Source data: - MODIS/Terra Vegetation Indices 16-Day L3 Global 500 m SIN Grid (MOD13A1 v006): https://lpdaac.usgs.gov/products/mod13a1v006/ - MODIS/Aqua Vegetation Indices 16-Day L3 Global 500 m SIN Grid (MYD13A1 v006): https://lpdaac.usgs.gov/products/myd13a1v006/ The MOD/MYD13A1 Version 6 product provide Vegetation Index (VI) values at a per pixel basis at 500 meter (m) spatial resolution. There are two primary vegetation layers. The first is the Normalized Difference Vegetation Index (NDVI), which is referred to as the continuity index to the existing National Oceanic and Atmospheric Administration-Advanced Very High Resolution Radiometer (NOAA-AVHRR) derived NDVI. The second vegetation layer is the Enhanced Vegetation Index (EVI), which has improved sensitivity over high biomass regions. The algorithm for this product chooses the best available pixel value from all the acquisitions from the 16 day period. The criteria used is low clouds, low view angle, and the highest NDVI/EVI value. For the time periods October 2016 - March 2017 and August 2020 - April 2021, the original data has been reprojected to ETRS89-extended / LAEA Europe and aggregated to a 1 km grid. The temporal resolution is 16 days. Bad quality pixels or pixels with snow/ice and/or cloud cover have been masked using the provided quality assurance (QA) layers and appear as "no data". File naming: productCode.acquisitionDate[A (YYYYDDD)]_mosaic_spatialResolution_frequency_VI.tif example: MOD13A1.A2020305_mosaic_1000m_16_days_NDVI.tif The date is Year and Day of Year. Values are NDVI/EVI * 10000. Example: Value 6473 = 0.6473
-

The Land Cover Map of Europe 2017 is a product resulting from the Phase 2 of the S2GLC project. The final map has been produced on the CREODIAS platform with algorithms and software developed by CBK PAN. Classification of over 15 000 Sentinel-2 images required high level of automation that was assured by the developed software. The legend of the resulting Land Cover Map of Europe 2017 consists of 13 land cover classes. The pixel size of the map equals 10 m, which corresponds to the highest spatial resolution of Sentinel-2 imagery. Its overall accuracy was estimated to be at the level of 86% using approximately 52 000 validation samples distributed across Europe. Related publication: https://doi.org/10.3390/rs12213523
-
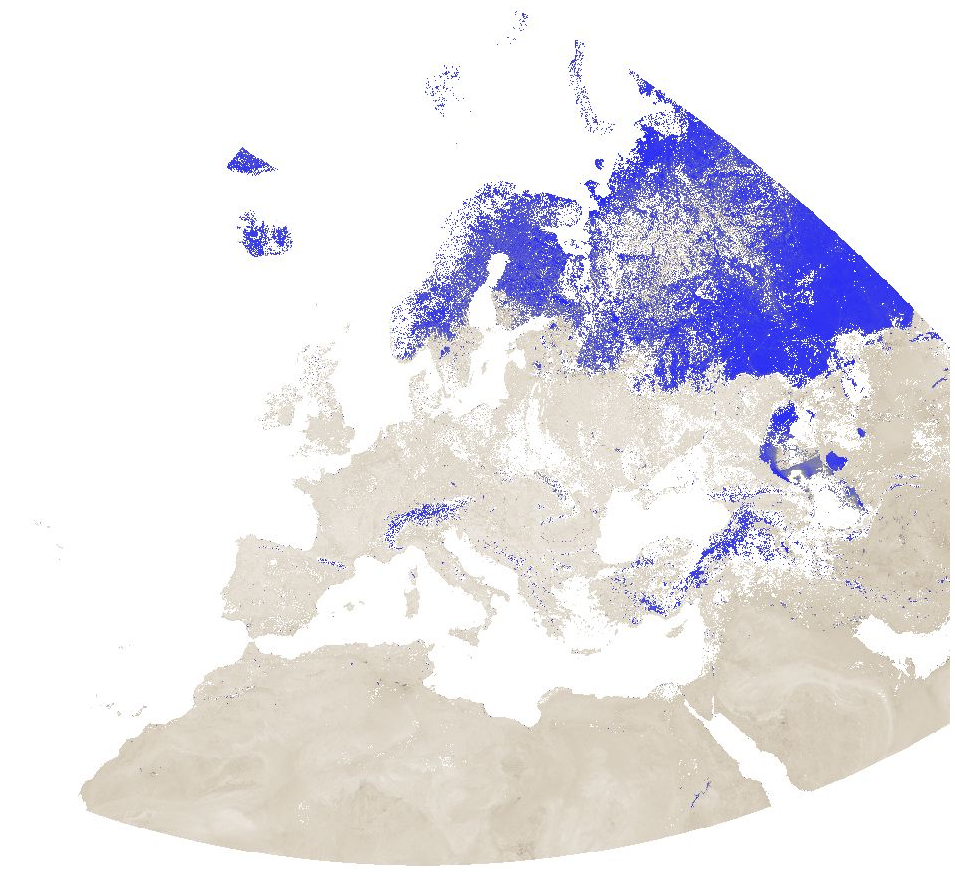
Modified Normalized Difference Water Index (MNDWI) from MODIS data for Europe at 1 km resolution. Source data: - MODIS/Terra Surface Reflectance 8-Day L3 Global 500 m SIN Grid (MOD09A1 v006): https://lpdaac.usgs.gov/products/mod09a1v006/ The corresponding MODIS/Aqua product (MYD09A1 v006) could not be used due to the fact that the Aqua satellite has a number of broken detectors resulting in unreliable data for band 6 (SWIR) measurements. The Moderate Resolution Imaging Spectroradiometer (MODIS) Terra MOD09A1 Version 6 product provides an estimate of the surface spectral reflectance of Terra MODIS Bands 1 through 7 corrected for atmospheric conditions such as gasses, aerosols, and Rayleigh scattering. Along with the seven 500 meter (m) reflectance bands are two quality layers and four observation bands. For each pixel, a value is selected from all the acquisitions within the 8-day composite period. The criteria for the pixel choice include cloud and solar zenith. When several acquisitions meet the criteria the pixel with the minimum channel 3 (blue) value is used. For the time periods October 2016 - March 2017 and August 2020 - April 2021, the original data has been reprojected to ETRS89-extended / LAEA Europe and aggregated to a 1 km grid. The temporal resolution is 8 days. Bad quality pixels (cloud, cloud shadow, dead detector, solar zenith angle too large, etc.) have been masked using the provided quality assurance (QA) layers and appear as "no data". File naming: productCode.acquisitionDate[A (YYYYDDD)]_mosaic_spatialResolution_frequency_VI.tif example: MOD09A1.A2016353_mosaic_1000m_8_days_MNDWI.tif The date is Year and Day of Year. Values are MNDWI * 10000. Example: Value -5099 = -0.5099
-
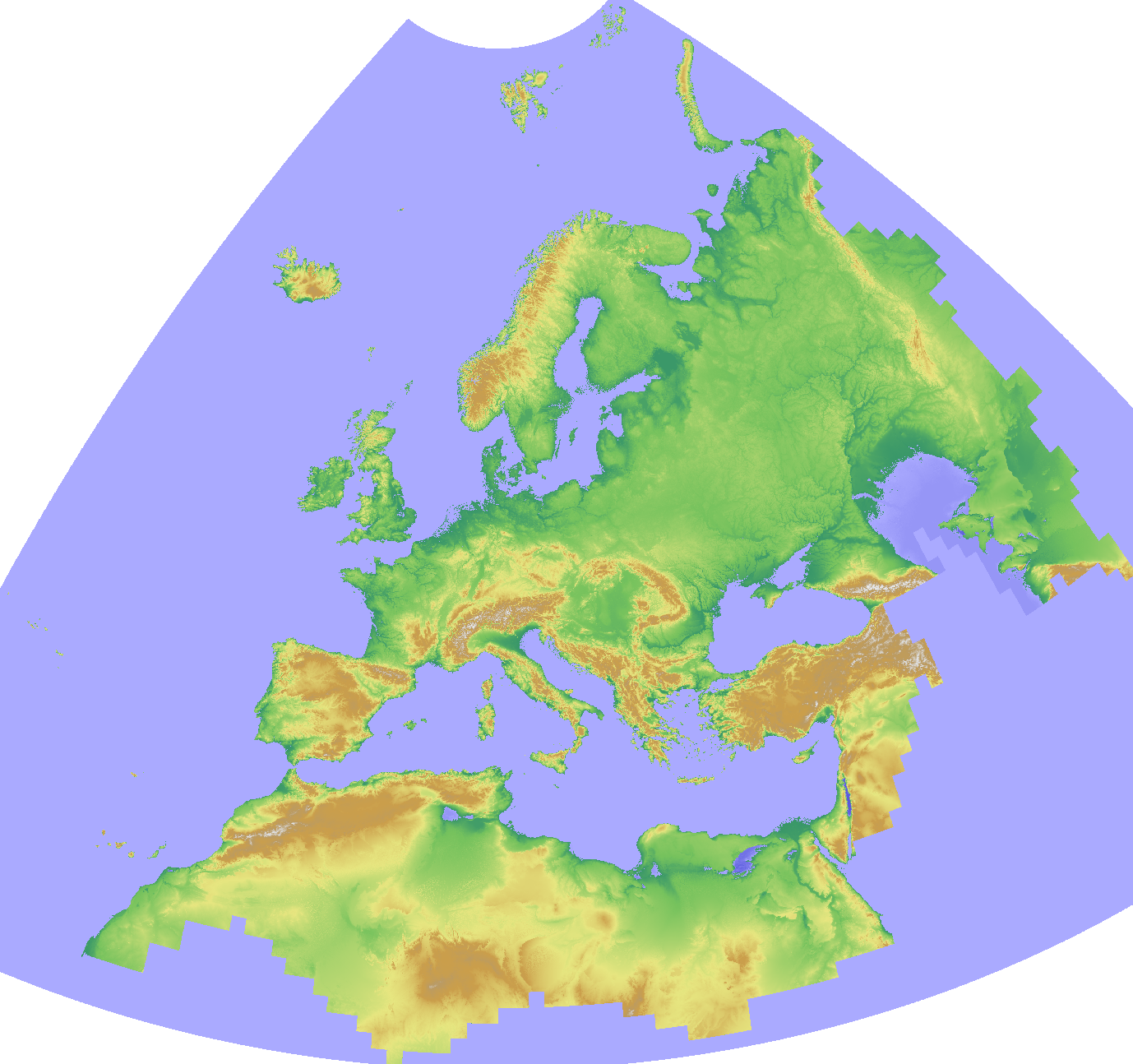
The Copernicus DEM is a Digital Surface Model (DSM) which represents the surface of the Earth including buildings, infrastructure and vegetation. The original GLO-30 provides worldwide coverage at 30 meters (refers to 10 arc seconds). Note that ocean areas do not have tiles, there one can assume height values equal to zero. Data is provided as Cloud Optimized GeoTIFFs. Note that the vertical unit for measurement of elevation height is meters. The Copernicus DEM for Europe at 30 meter resolution (EU-LAEA projection) in COG format has been derived from the Copernicus DEM GLO-30, mirrored on Open Data on AWS, dataset managed by Sinergise (https://registry.opendata.aws/copernicus-dem/). Processing steps: The original Copernicus GLO-30 DEM contains a relevant percentage of tiles with non-square pixels. We created a mosaic map in https://gdal.org/drivers/raster/vrt.html format and defined within the VRT file the rule to apply cubic resampling while reading the data, i.e. importing them into GRASS GIS for further processing. We chose cubic instead of bilinear resampling since the height-width ratio of non-square pixels is up to 1:5. Hence, artefacts between adjacent tiles in rugged terrain could be minimized: gdalbuildvrt -input_file_list list_geotiffs_MOOD.csv -r cubic -tr 0.000277777777777778 0.000277777777777778 Copernicus_DSM_30m_MOOD.vrt In order to reproject the data to EU-LAEA projection, bilinear resampling was performed in GRASS GIS (using r.proj) and the pixel values were scaled with 1000 (storing the pixels as Integer values) for data volume reduction. In addition, a hillshade raster map was derived from the resampled elevation map (using r.relief, GRASS GIS). Eventually, we exported the elevation and hillshade raster maps in Cloud Optimized GeoTIFF (COG) format, along with SLD and QML style files. Note that GLO-30 Public provides limited coverage at 30 meters because a small subset of tiles covering specific countries are not yet released to the public by the Copernicus Programme. Note that ocean areas do not have tiles, there one can assume height values equal to zero. Data is provided as Cloud Optimized GeoTIFFs.
-

Base epoch 2015 from the Collection 3 of annual, global 100m land cover maps. Other available (consolidated) epochs: 2016 2017 2018 2019 Produced by the global component of the Copernicus Land Service, derived from PROBA-V satellite observations and ancillary datasets. The maps include: - a main discrete classification with 23 classes aligned with UN-FAO's Land Cover Classification System, - a set of versatile cover fractions: percentage (%) of ground cover for the 10 main classes - - a forest type layer quality layers on input data density Online map viewer: https://lcviewer.vito.be
-

This data set contains the administrative boundaries at country level of the world and is based on the geometry from EBM v12.x. of EuroGeographics for the members of Eurogeographics, the Global Administrative Units Layer (2015) from FAO (UN) and geometry from the Turkish National Statistical Office. This dataset consists of 2 feature classes (regions, boundaries) per scale level and there are 6 different scale levels (100K, 1M, 3M, 10M, 20M and 60M). The public data set (1M - 60M) is available under the Download link indicated below. The full data set (100K - 60M) GISCO.CNTR_2016 is available via the EC restricted download link.
-

The Copernicus DEM is a Digital Surface Model (DSM) which represents the surface of the Earth including buildings, infrastructure and vegetation. We provide two instances of Copernicus DEM named GLO-30 Public and GLO-90. GLO-90 provides worldwide coverage at 90 meters. GLO-30 Public provides limited worldwide coverage at 30 meters because a small subset of tiles covering specific countries are not yet released to the public by the Copernicus Programme. Note that in both cases ocean areas do not have tiles, there one can assume height values equal to zero. Data is provided as Cloud Optimized GeoTIFFs. Two releases (i.e. 2019 and 2020) are currently available for all Copernicus DEM instances with the exception of COP-DEM_GLO-30-DTED_PUBLIC and COP-DEM_GLO-30-DGED_PUBLIC, only available as 2019 release. A full collection of tiles per each release can be found via FTP and PANDA Catalogue under dataset names marked with “2019_1” and “2020_1”. The 2020 release has undergone the following improvements with respect to the 2019 release: - infilling with high resolution DEM over Norway; - addition of 5 geocells containing missing small islands; - editing of source raw data; - correction of minor data/auxiliary files inconsistencies; - correction of implausible values. The products impacted by improvements can be identified via a dedicated list: https://spacedata.copernicus.eu/documents/20126/0/COP-DEM_delivery_sheet_v0.7_PUBLIC+%282%29.xlsx/771ce82f-0084-849d-8a34-702c421eacf2?t=1611651454540
-

Overview: The Essential Climate Variables for assessment of climate variability from 1979 to present dataset contains a selection of climatologies, monthly anomalies and monthly mean fields of Essential Climate Variables (ECVs) suitable for monitoring and assessment of climate variability and change. Selection criteria are based on accuracy and temporal consistency on monthly to decadal time scales. The ECV data products in this set have been estimated from climate reanalyses ERA-Interim and ERA5, and, depending on the source, may have been adjusted to account for biases and other known deficiencies. Data sources and adjustment methods used are described in the Product User Guide, as are various particulars such as the baseline periods used to calculate monthly climatologies and the corresponding anomalies. Surface air relative humidity: The ratio of the partial pressure of water vapour to the equilibrium vapour pressure of water at the same temperature near the surface. Spatial resolution: 0:15:00 (0.25°) Temporal resolution: monthly Temporal extent: 1979 - present Data unit: percent * 10 Data type: UInt8 CRS as EPSG: EPSG:4326 Processing time delay: one month
-
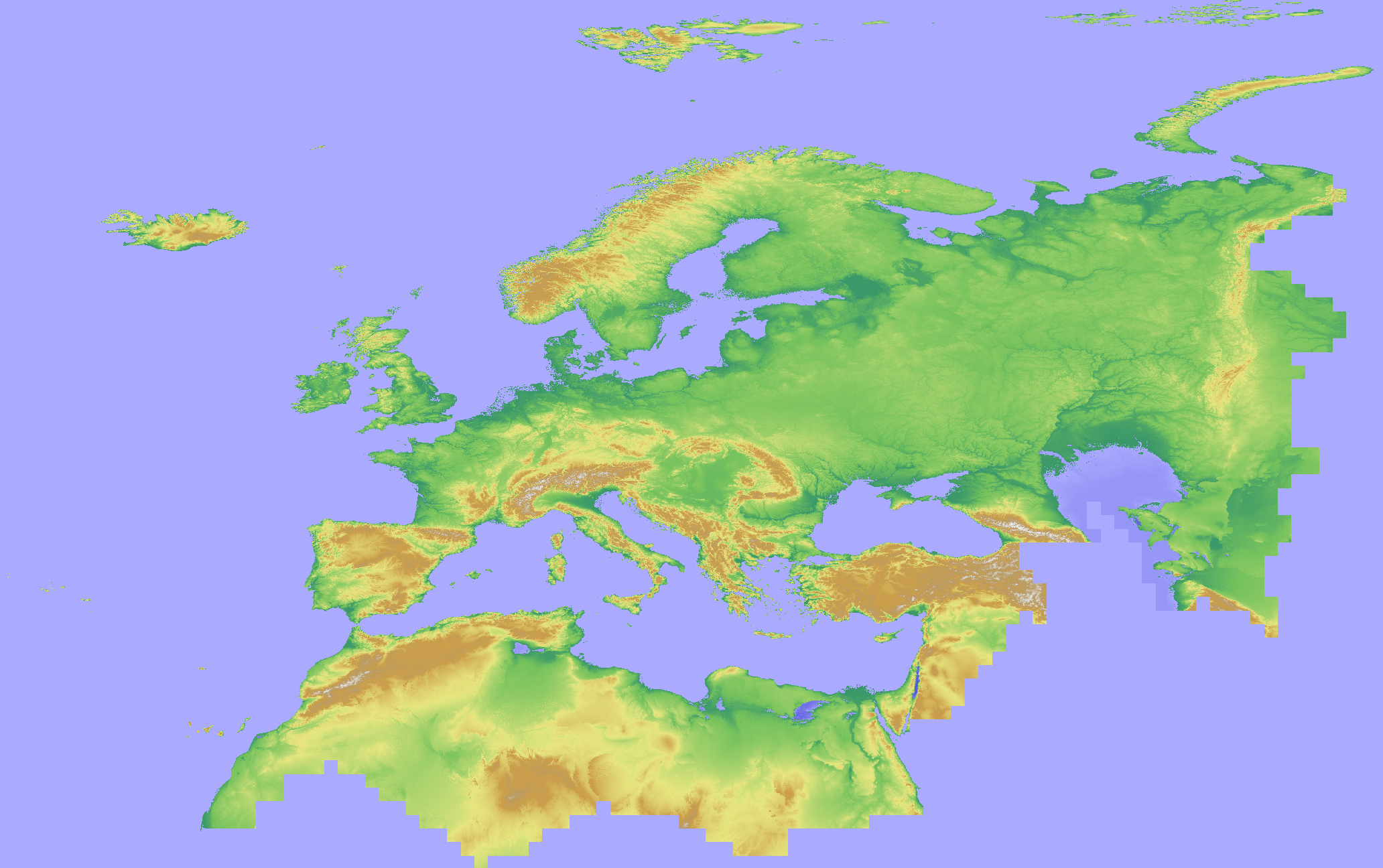
Here we provide a mosaic of the Copernicus DEM 30m for Europe and the corresponding hillshade derived from the GLO-30 public instance of the Copernicus DEM. The CRS is the same as the original Copernicus DEM CRS: EPSG:4326. Note that GLO-30 Public provides limited coverage at 30 meters because a small subset of tiles covering specific countries are not yet released to the public by the Copernicus Programme. Note that ocean areas do not have tiles, there one can assume height values equal to zero. Data is provided as Cloud Optimized GeoTIFFs. The Copernicus DEM is a Digital Surface Model (DSM) which represents the surface of the Earth including buildings, infrastructure and vegetation. The original GLO-30 provides worldwide coverage at 30 meters (refers to 10 arc seconds). Note that ocean areas do not have tiles, there one can assume height values equal to zero. Data is provided as Cloud Optimized GeoTIFFs. Note that the vertical unit for measurement of elevation height is meters. The Copernicus DEM for Europe at 30 m in COG format has been derived from the Copernicus DEM GLO-30, mirrored on Open Data on AWS, dataset managed by Sinergise (https://registry.opendata.aws/copernicus-dem/). Processing steps: The original Copernicus GLO-30 DEM contains a relevant percentage of tiles with non-square pixels. We created a mosaic map in https://gdal.org/drivers/raster/vrt.html format and defined within the VRT file the rule to apply cubic resampling while reading the data, i.e. importing them into GRASS GIS for further processing. We chose cubic instead of bilinear resampling since the height-width ratio of non-square pixels is up to 1:5. Hence, artefacts between adjacent tiles in rugged terrain could be minimized: gdalbuildvrt -input_file_list list_geotiffs_MOOD.csv -r cubic -tr 0.000277777777777778 0.000277777777777778 Copernicus_DSM_30m_MOOD.vrt The pixel values were scaled with 1000 (storing the pixels as integer values) for data volume reduction. In addition, a hillshade raster map was derived from the resampled elevation map (using r.relief, GRASS GIS). Eventually, we exported the elevation and hillshade raster maps in Cloud Optimized GeoTIFF (COG) format, along with SLD and QML style files.